カメラによる3D計測 画像認識技術
バラ積みされた対象物の微細な特徴をとらえ、位置・姿勢を検出。より立体的な画像認識を実現

製造現場や物流倉庫など、大量にモノをさばく現場での人手不足が深刻さを増すなか、より高度な認識精度のもと、自律的に正確な動作を行える産業用ロボットのニーズが年々高まっています。当社では、対象の凹凸を正確にとらえ、精密な3D撮影が可能な小型カメラユニットを活用することで、製造現場などの作業自動化をサポートいたします。
どんな技術?何ができる?
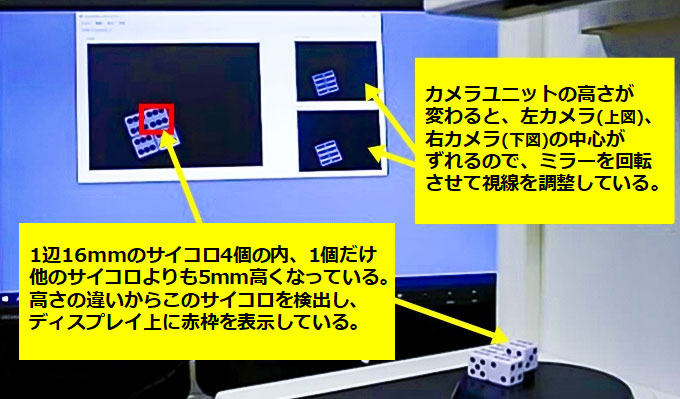
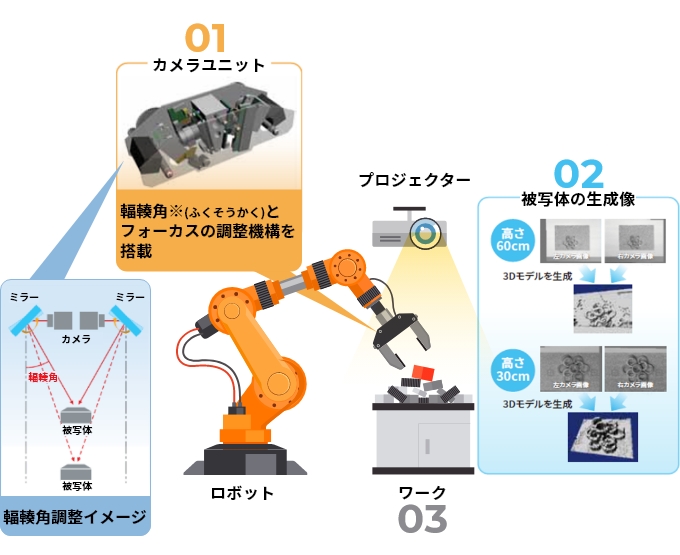
カメラ - 被写体間の距離変化に合わせて輻輳角(ふくそうかく)※と焦点位置を自動調整することで被写体の形状を高精度に認識できます。例えば産業用ロボットのハンド部分先端にカメラを装着しロボットアームとともに被写体に接近、一番上にあるものを検出しピッキングするといった活用が期待できます。
※輻輳角(ふくそうかく):被写体を見込む視線の確度

デモ動画概要
- 被写体
- サイコロ4個、4個のうち1個だけ、他のサイコロよりも高さが5mm高いものがある
- デモ概要
- 上下するカメラユニット内のミラーを回転させて輻輳角を調整し、同時にフォーカスも調整しながら各サイコロの高さを検出、ディスプレイ上に赤枠で表示する。赤枠がついているサイコロが「一番高い」と判断されたものであることが判明する。
デモ動画

※音声ONで再生されます。
特長・強み
- ①被写体の細かな部分まで計測可能
- ②小型で軽量、大小様々な既存設備に取付可能
- ③お客様環境や用途、被写体に合わせて最適な設定にカスタム可能
想定活用シーンの紹介
カメラユニットを取り付けた産業用ロボットアームによるバラ積み部品のピッキング
- ①3D撮影可能な小型カメラユニットを産業用ロボットアーム先端近辺に装着
- ②ロボットアームごと被写体に接近し撮影、光の当たり方などから凹凸を高精度に測定
- ③認識した画像より最上部を自動認識し、バラ積みワークの最上部からピッキング
その他活用シーン
- 製造現場でのピッキング作業
- ドローン
- 物流倉庫でのフォークリフト作業
- 無人搬送車
当社が提供する技術
本技術を活用したシステムを導入する際、下記エンジニアリング技術でお客様の課題を解決します。
- 3D計測 ソフトウェアライブラリ
- 3D計測技術を活用した各種試作機等のハードウェア開発
- ライブラリとハードウェアの最適設定の調整
- お客様環境に最適な、カメラ制御アプリケーションの開発

まずはお気軽にお問い合わせください!
- 詳細説明のご希望
- ピッキング対象物
- 納期
- 現状の課題など
カメラ固定/移動式、測定距離、対象となる被写体など
お客様の環境・ご要望に合った最適なシステムをご提案します
