モデルベース開発ソリューション
制御系車載機器ソフトウェア開発現場において、開発工数の削減と高品質の両立を実現。
モデルベース開発(MBD:Model Based Development)とは
MBDとは、シミュレーション技術を取り入れたシステム開発手法です。MBDではハードウェア機器の完成を待たずにシミュレーション環境上でソフトウェアの実装・検証作業を進めることができます。仕様書としても扱えるモデルから自動的にコードを生成でき、特に制御系の車載システム開発現場で活用されています。部品実物を製品に実装・検証する場合と比べ、コスト・工数の削減や生産性向上といったメリットが挙げられます。
モデルベース開発の活用例
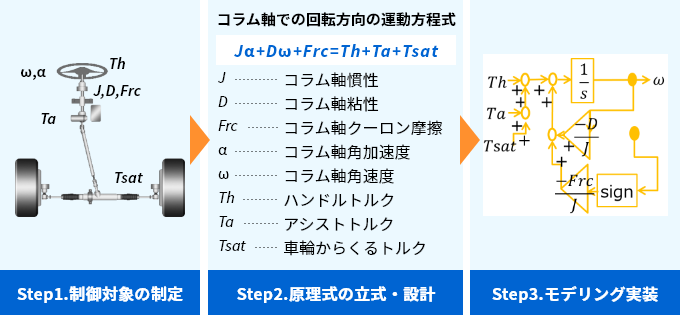
EPS制御を対象にMBDにおける実際の工程例を示します
①プラントモデルの設計と実装
- 制御される側のモデルで、制御対象機器(コラム軸, ハンドルトルク, アシストトルク)を指す
②コントローラモデルの設計と実装
- 制御する側のモデルで、開発対象の制御モジュール(EPS用ECU)を指す
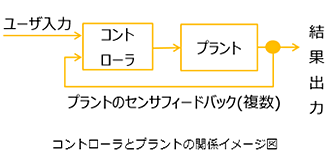
③プラントモデル・コントローラモデルの接続と検証
-
両者をMILS(Model In the Loop Simulation)環境等で右図のように続してシミュレーション検証を行います。また、プラント側のセンサフィードバックをコントローラ側に入れ、出力値調整が行えるようにします。モデルの実装としてSimulink®を使い、コントローラモデルの設計に基装としてSimulink®を使い、コントローラモデルの設計に基づいた「連続時間のコントローラモデル」を作成し、ソフトウェア用の「離散時間のコントローラモデル」を作成します。モデルの検証として「連続時間」と「離散時間」のコントローラモデルから振る舞いのテストを行います。
-